

























ADASとは
ADASはAdvanced Driver Assistance System(先進運転支援システム)の略であり、ドライバーが車両をより安全に運転できるように支援する、様々なテクノロジーを連携させたシステムです。米国運輸省道路交通安全局の調査によると、深刻な自動車事故のおよそ94%はヒューマンエラーが原因です。ADASは、自動検出、ナビゲーション、および回避機能を自家用車や商用車両に統合したシステムで、交通事故を減らすために開発されました。
ADASソフトウェアの最大の目的は安全の確保です。車両の環境把握能力や、数ミリ秒以内に適切に対応する能力を向上させることで、ADASシステムを搭載した車両は危険を回避する優れた能力を備えることになります。ADASでは、LiDAR、レーダー、カメラなどのセンサーが連携して、歩行者検出機能や車線逸脱警告機能などに通知を送ります。さらに、ADASはドライバーの負担やストレスを軽減し、快適性と利便性を向上させ、完全自動運転への移行を促進する点においても重要となります。
ADASは、自動運転のレベル2およびレベル2+に該当します。 自律性レベルが高くなるにつれて、機械による制御が増え、人間による制御が減ります。現在、ADASテクノロジーによって、運転に関するあらゆる部分を機械で制御できるようになりつつあります。ドライバーが不要になるという概念にドライバーが順応していくことで、最終的にはレベル5(完全自動運転)への到達を目指します。
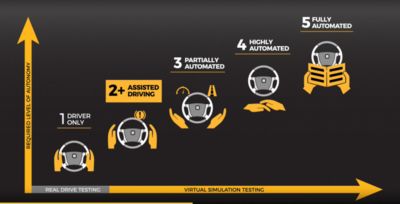
注: 自動運転のレベル2とレベル2+の違い: L2+でも、ドライバーが主導権を持ち制御してはいるものの、より高いレベルの自動化を実現する追加機能(自動車線変更など)が含まれています。
ADASのタイプ
ADASには、基本的な支援から高度な自動化まで、さまざまな機能が含まれます。次のような機能があります。
アダプティブクルーズコントロール(ACC): 前方の車両に合わせて速度を調整することで、ドライバーが安全な車間距離を維持できるようにします。
アダプティブドライビングビーム(ADB)ヘッドライト: 必要となる車両の外部照明に合わせて、ハイビームからロービームに切り替える、あるいはフォーカスを正しい方向に調整します。
自動緊急ブレーキ(AEB): 衝突が予想されるときに自動でブレーキをかけます。
死角検出(BSD): 車両側面の視野外に他の車両が接近すると、ドライバーに通知を送ります。この機能は車線変更時に役立ちます。
クロストラフィックアラート(CTA): 後進時に、接近する車両を感知してドライバーに警告することで、衝突のリスクを低減します。
ドライバー眠気検知: ドライバーを監視し、疲労の兆候を感知したときに警告することで、事故を防止します。
パーキングアシスト: 縦列駐車時または並列駐車時に、駐車場所や周囲の障害物を感知し、駐車操作を自動的に実行します。
交通標識認識: この機能は、ドライバーのヘッドアップディスプレイと連携して、速度制限やその他の交通標識を識別し、ドライバーに情報を提供します。
ADASのコンポーネント
ADASは、運転の安全性と快適性を向上させるために連携する、いくつかの個別のコンポーネントで構成されています。各コンポーネントから受け取るリアルタイム情報を使用して環境を認識し、アクションを計画し、自動車の機械構成部品を制御してアクションを実行します。
センサー: カメラ、レーダー、LiDAR、超音波センサー、赤外線センサーなど、情報を取り込むすべてのコンポーネントを含みます。これらのセンサーは、他の物体の距離、速度、温度を検出し、路面標識や交通標識を解釈するための視覚情報を捕捉します。
チップやプロセッサ: システムに搭載された集積回路により、センサーインターフェースやデータ処理が制御されることで、コンポーネント間の通信が容易になります。
制御ユニット: 制御ユニットは、組込みソフトウェアを使用してデータを組み合わせ、意思決定を行い、車両の機械システムにコマンドを送信します。
アクチュエータ: 制御ユニットによって車両の挙動が決定すると、アクチュエータによって電子信号が物理的な動作に変換されます。パワーステアリング、ブレーキ、スロットルアクチュエータなどがあります。
ADASテクノロジーの開発方法
ADASの設計と開発は、複数のテクノロジーを統合することの複雑さに加え、複数の課題があるため、特有の難しさがあります。まず、ADASは動的条件に適応しながらリアルタイムの応答を必要とします。さらに、人間と機械のやり取りが必要となるため、混乱を排除し、ユーザーフレンドリーな操作を保証するには、直感的なコミュニケーションが不可欠になります。ADASは、車載の電気および電子システムに適用される機能安全(FuSa)に関する国際規格であるISO26262など、複雑な規制の対象となります。
ADASを開発するために、エンジニアは研究、設計、テストなどの複数の段階で構成されるプロセスを進める必要があります。
- 研究: 新しいADAS機能のアイデア(または既存の機能の改善)は、新しいテクノロジー、変化する規制要件、メーカーから提供される情報、さらにはユーザートレンドに基づいて検討されます。
- 設計: センサーの選択と配置、ソフトウェアおよびハードウェアコンポーネント、ヒューマンマシンインターフェースを組み合わせてコンセプトを考案し、実装に向けた仕様の設定を促進します。
- テスト、検証、妥当性確認: システムのすべてのコンポーネントを個別に、そしてシステムとしてまとめて評価して、ADAS機能が実環境シナリオで安全性と性能の要件を満たすことを確認します。
設計段階とテスト段階では、エンジニアはシミュレーションソフトウェアを使用して、物理的なプロトタイプを作成する前に、あらゆる選択肢を検討して、設計が規制基準を満たすことを確認します。シミュレーションソフトウェアを使用することで、エンジニアからは直接見えない、ADASシステム内部での多分野にわたるテクノロジーや仕組みの複雑な連携を予測して、その妥当性を確認できます。
さらに、シミュレーションを導入することで、数十億マイルを超える車両のロードテストが不要になります。これらの仮想モデルを使用することで、実環境での運転テストで達成するには危険が高く、コストや時間もかかりすぎる、予期しない重要なエッジケースを含め、数百万のシナリオを評価できるようになります。 シミュレーションによる仮想テストは、消費者からの信頼や支持を高めながらコンプライアンスを達成する高度なADASシステムの開発を加速させ、実現できる唯一の方法です。
ADASテクノロジーの未来
ADASの未来は、主要な課題を克服できるかどうかにかかっています。極端な気象条件などの予期しない運転シナリオ、規制基準への準拠、サイバーセキュリティリスク、ドライバーへの啓蒙など、ADASの進化を複雑にする要素は複数あります。これらのシステムの検出、認識、および実行機能が向上し続ければ、将来的に完全自動運転車を生産できるようになるでしょう。
レベル5の自律性を達成するには、既存の機能の強化とセンサー融合技術の統合、AI主導の意思決定への依存の高まり、V2X(Vehicle-to-Everything)などのロバストな通信機能が必要です。完全自動運転が実現するまでは、エンジニア、自動車メーカー、技術開発者、そしてドライバーと連携し、ADASは道路上の安全性向上に大きな役割を果たすでしょう。