

























Ansysブログ
April 10, 2024
EVの航続距離の計算: 十分な距離とは
COVESA EV Power Optimizationプロジェクトで、シミュレーションを使用して、EVの航続距離を延長するバッテリ省電力アプリを開発している様子をご覧ください。
電気自動車(EV)を所有する上で大きな心理的障壁となるのは、車体の価格と、走行中にバッテリが切れてしまうのではないかという心配、つまり航続距離に対する不安です。1回の充電で走行できる距離が限られていることに加えて、利用可能な施設や高速充電ステーションが不足していることで、消費者の不安感は高まり、普及率が低迷しています。
もしも、目的地に到達するのに十分な電力を取り戻すことができるEVパワーマネジメントアプリがあった場合はどうでしょう。Hyundai Mobis社、digital.auto社、Bosch社、Ansys、そしてFerdinand-Steinbeis Instituteが共同で進めているCOVESA EV Power Optimizationプロジェクトは、まさにそうしたアプリを開発中です。これは、自動車メーカー、サプライヤー、スタートアップ、エンドユーザーが協力して、次世代のソフトウェア制御される車両体験を創造するオープンコミュニティであるdigital.auto.initiativeが目指す大きな目標の一環です。
1つのアプリでさまざまな可能性を実現
航続距離は、1ガロンで走行できる距離、あるいは満タンのガソリンで走行できる距離として捉えることが多いでしょう。EVの航続距離は、ガロンではなく、キロワット時(kWh)で測定します。EVの航続距離は、OEMと政府機関(EPA: 米国環境保護庁)の両方によって指定されています。これは理論的な距離を表します。
実際の走行距離は、車両システム、ドライバーの挙動、およびその他の外的要因に関連するさまざまな要素によって変化します。
たとえば、天候が変化した場合は、暖房、換気、空調(HVAC)に電気が使用されるため、EV航続距離が最大で25%低下します。これは、ガソリン車では、放出されるほとんどの熱がコックピットの暖房に使用される一方で、EVでは、HVAC制御を電気のみに依存しており、それがバッテリの消耗に寄与するためです。さらに、急激な加速など、個々の運転習慣もバッテリ寿命に影響を与えます。
こうしたさまざまな要因によるエネルギー損失を軽減するために、COVESA EV Power Optimizationプロジェクトでは、EVの充填状態(SOC: State of the Charge)を常に監視できるソリューションを提案しています。航続距離の問題が特定できれば、SOCが低下したときに、アプリによって車両内の重要でないシステムの電源がオフになり、車両の航続距離を延長するための適切な措置がとられるようになります。
つまり、車両を停止させて再充電する必要がなくなります。SOCが低下した場合、ドライバーに対して警告が発せられ、その後に特定の車両システムの電源がオフになります。たとえば、ラジオの音量やHVAC設定が下げられ、車内の照明が薄暗くなります。
Robert Bosch社の戦略エコシステム(C/IDP)担当バイスプレジデントであるDirk Slama教授は、次のように述べています。「このプロジェクトの目的は、バッテリの充電が一定レベルまで低下したときに、スマートフォンのように省電力モードでEVが動作できるようにすることです。結果として、EVは航続距離を伸ばし、ドライバーは次の目的地に到達できるようになります。」
COVESA車両信号規格を介したdigital.auto社とAnsysのテクノロジーの統合
このプロジェクトの当初の目標は、航続距離に対する不安を軽減するEV向けの省電力モードをサポートするための新しい電力最適化ポリシーとアルゴリズムを実現し、検証することでした。このソリューションを実現するために、チームはdigital.auto社の「#digitalfirst」アプローチに従いました。digital.auto playground(仮想開発環境)において、車両信号規格ベースのCOVESA車両APIに対して省電力アルゴリズムが実装されました。

上の図に示すdigital.auto社の「#digitalfirst」開発アプローチは、デジタルツインを使用して、関連ハードウェアの仮想プロトタイプに基づくソフトウェア製品開発を加速させることに焦点を当てたシフトレフトアプローチを採用しています。
テスト車両を作製せずに現実に即した仮想テスト環境を得るために、Ansys Twin Builderを使用して、物理特性とデータに基づいた忠実度の高いEV消費電力システムのデジタルツインを作成しました。このシステムの仮想表現は、電力最適化アルゴリズムおよびポリシーの検証に役立ちました。
実際の省電力アプリケーションには、COVESA Vehicle Safety Standards(VSS)APIを介してdigital.auto playgroundとデジタルツインが統合されました。これにより、デジタルツインと開発環境の間で速度や加速度などの車両信号データを適切にやり取りすることができます。フロントエンドのdigital.autoテクノロジーとオンザフライ同期を使用することで、SOCや航続距離といった車両パラメータのフィードバック共有が可能になります。
このように、digital.auto playgroundは実際のCOVESA車両APIを使用して、クラウドネイティブ環境であらゆるものを統合し、自発的な最適化をサポートします。最終的には、Twin Builderを介したデジタルツインシミュレーションを使用した車両の仮想化が、複数の分野にわたるEVエコシステム全体のテストおよび妥当性確認を実行できるように、ソフトウェア制御される車両(SDV)の概念を実現する上で重要な推進要因となりました。
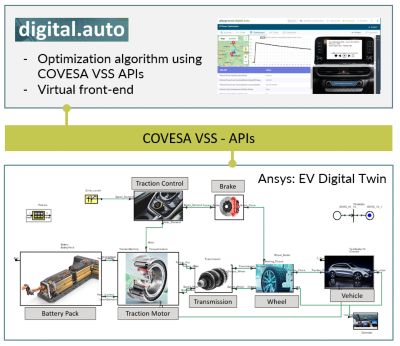
COVESA VSSおよびdigital.autoのテクノロジーとAnsys EVデジタルツインの統合。COVESA APIをホストするdigital.autoプラットフォームはフロントエンドに表示され、バックエンドではAnsys EVデジタルツインが動作します。
複数のシミュレーションソリューションがデジタル統合を推進
Twin Builderを使用することで、システムモデルの迅速な作成と統合が可能になります。これは後で、EV全体をカバーするデジタルツインまたはシステムオブシステムズモデルとして展開できます。これを行うために、まず複数のシステムを個々のモデルとして捕捉しました。これには、モータ、バッテリ、HVACシステムなどのより複雑なシステムの次数低減モデル(ROM)が含まれます。ROMは、忠実度の高い計算モデルの抽象モデルです。
具体的には、3Dシミュレーションの詳細を状況に合わせてROMとして取り込むために、Twin BuilderとAnsysの他の物理ベースのシミュレーションソリューションを組み合わせて、より正確で効率性に優れたシステムレベルモデルを作成しました。そのために、ソフトウェアではAnsysの構造、流体、電磁界、および半導体解析製品で作成されたROMを使用して、機械アセンブリ、電磁アクチュエータおよび機械、回路およびケーブルの寄生成分、熱回路網、シグナルインテグリティをモデル化しました。
結果として得られたデジタルツインは、あらゆるインダストリアルIoT(IIoT)プラットフォームでコンテナ化されたアプリとして展開でき、COVESA APIなどの標準APIを介して任意のアセットにリンクできます。digital.auto社のようなラピッドプロトタイピングプラットフォームに統合すると、最新の条件やシステム応答に合わせてリアルタイムの応答を促すリアルタイムの出力やコマンドが提供され、実際に航続距離を延長できるタイミングを特定できるようになります。
最終的に、仮想ハードウェアと実際のハードウェアを統合することで、オートモーティブグレードのシステム設計が実現します。テストハードウェアは、SDV/COVESAテストハードウェア用のオープンソース設計であるdigital.auto dreamKITに基づいており、playgroundから展開されたプロトタイプに自動的に対応します。

上の図は、EV電力最適化アプリの主要パラメータが表示されたdigital.auto playgroundのユーザーインターフェースを含む、digital.auto playgroundのSDVデモアプリケーションです。
ソフトウェア制御された未来に向けてCOVESA-EV Power Optimizationプロジェクトが参入
このコラボレーションはCOVESA-EV Power Optimizationプロジェクトに多くのメリットをもたらしています。「#digitalfirst」プロトタイピングアプローチでTwin Builderを使用したことで、消費電力最適化ソフトウェアアルゴリズムの迅速な検証と妥当性確認が可能になり、物理的なプロトタイプを作製する場合と比べてコスト、工期どちらの観点においても大幅な改善となりました。
Slama教授は次のように述べています。「このアプローチは、非常に大きなメリットをもたらします。digital.auto playgroundを使用することで、実際のCOVESA車両APIを使用して、クラウドネイティブ環境であらゆるものを統合し、自発的な最適化をサポートできます。Ansys Twin Builderに基づくデジタルツインシミュレーションの導入は、車両の仮想化の重要な推進要因であり、SDVテクノロジーへの参入にも大きな後押しとなります。」
Ansys Twin BuilderがEV設計にどのように役立つかをご紹介します。