

























Ansysブログ
December 3, 2021
自動運転車に適したセンサーを選択する方法
1885年に世界初の「モトールヴァーゲン」が登場したとき、自動車がいつか自動運転するようになるという概念は滑稽であると考えられていました。しかし、今日ではアシスト車両や自動運転車は、デジタルセンサーが動き、距離、速度を認識する人間の能力を凌駕する時代の現実となりました。
カメラ、LiDAR、レーダー、超音波などのセンサーテクノロジーを組み合わせて使用すると、人間の介入なしに、あるいは若干の介入によって、車両が安全に走行できるように、その環境を完全に識別できるようになります。
しかし、エンジニアや設計者が安全性、機能性能、価格といったエンドユーザーのニーズを満たすために、これらのセンサーの適切な組み合わせを特定するには、各センサータイプの役割、機能、および制限事項を慎重に検討する必要があります。
車両のセンサーアプリケーション例:
- 自動緊急ブレーキ
- 死角警告
- 車線逸脱警告
- 車線中央維持支援
- アダプティブクルーズコントロール
- 渋滞時の自動運転
- 無人タクシーおよび配達
4つの自律センサータイプ
1. カメラ
高解像度デジタルカメラは、車両がその環境を見て、周囲の状況を解釈するのに役立ちます。車両周囲に複数のカメラが搭載されている場合、360度のビューにより、他の車両、歩行者、道路標識、交通標識など、車両の近くにある対象物を検出できます。
さまざまな設計ニーズを満たすために考慮すべきカメラのタイプとしては、NIRカメラ、VISカメラ、サーマルカメラ、ToF(Time of Flight)カメラなど、いくつかあります。大半のセンサーと同様に、カメラは互いに補完するために使用される場合に、その機能が最も発揮されます。
- NIRカメラ: 近赤外線(NIR: Near-InfraRed)カメラは、可視範囲外の光に依存し、多くの場合、LEDなどのNIRエミッターと組み合わせて使用されます。
- VISカメラ: 可視光の反射に基づいて対象物を識別します。
- サーマルカメラ: 対象物が放射する赤外線エネルギーによって対象物を検出します。
- Time of Flightカメラ: カメラと対象物の間の距離を測定します。

カメラは、操縦や駐車、車線逸脱した時の状況や、ドライバーの注意散漫を認識する場合に最適です。
2.LiDAR
LiDARは「Light Detection And Ranging」(光検出と測距)の略で、光パルスを使用して環境をスキャンし、3次元コピーを作成するリモートセンサーテクノロジーです。これはソナーと同じ原理ですが、LiDARは音波の代わりに光を使用します。自動運転車に搭載されたLiDARは、リアルタイムで周囲をスキャンし、車両が衝突を回避できるようにします。
LiDARの構成要素:
- エミッター: パルス状の光波を環境に発射し、対象物から光が反射して戻るまでの時間を測定して距離と深さを判断します。
- 受信機: 反射した光波を捕捉して、特定の対象物の形状、サイズ、速度、および距離を把握します。
- 信号処理: データをコンパイルして解釈します。
LiDARは、深さの認識と対象物の存在有無を把握することにおいては非常に正確です。長距離、あるいは夜間、雨や霧のような条件の悪い環境でも視認できます。 見たものを認識して分類するため、リスと石のような物体の違いを見分け、それに応じて挙動を予測することができます。
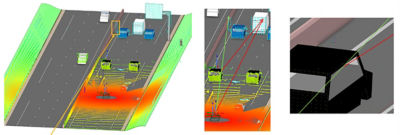
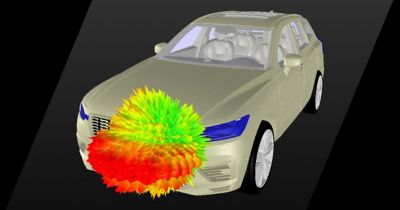
3.レーダー
レーダー(Radar)は「Radio Detecting And Ranging」(電波探知測距)の略です。このセンサーは、電磁波の形で短いパルスを発射して、環境内の対象物を検出します。波が対象物にぶつかると、すぐに反射してセンサーに戻ります。自動運転車に搭載されたレーダーは、他の車両や大きな障害物を識別するために使用されます。
レーダーの構成要素:
- 発信機: 無線信号を特定の方向に誘導します。
- 受信機: 対象物から反射した電波を捕捉します。
- インターフェース: 無線データをドライバーが理解しやすい情報に変換します。
レーダーは光に依存しないため、気象条件に関係なく良好な性能を発揮し、クルーズコントロールや衝突回避システムを実現するために最も一般的に使用されています。
4.超音速
レーダーは電波を、LiDARは光パルスを使用しますが、超音波センサーは、短い超音波インパルスを対象物に向かって送り、それがセンサーに反射されて戻ることで、環境内の対象物を評価します。非常に費用対効果が高く、固体の危険を検出するのに優れており、駐車中のドライバーに障害物があることを警告するために車両バンパーに搭載されます。運転支援アプリケーションで最良の結果を得るために、超音波センサーをカメラと組み合わせるのが一般的です。
興味深い事実: 最高の超音波センサーの多くは自然の中にあります。コウモリ、イルカ、イッカクは、どれも超音波を使用して物体を識別します(反響定位)。
個々のセンサーの比較
| カメラ | レーダー | 超音速 | LiDAR | |
| メリット | 高解像度カラー画像、高精細でリアル | 3D情報、コンパクト、長距離 | コンパクト、可動部品なし、光や天候に左右されない | 天候に左右されず、長距離で高解像度 |
| デメリット | 悪天候および低照度条件での性能低下 | 低解像度、カラーなし | 限定範囲 | カラーなし、価格 |
| コスト | 安価 | 安価 | 安価 | 高価 |
適切なセンサーの組み合わせを選択する方法
個々のセンサーはそれぞれにメリットがありますが、センサー情報の相互作用により運転支援が可能になります。また、車両が完全な自律型に向かうにつれて、自律性に必要な安全基準を達成するためには、適切なセンサーの組み合わせを選択することがさらに重要になります。
最高レベルの安全性と性能を実現するために、カメラ、レーダー、LiDAR、超音波のセンサー融合は、他のセンサーの弱点を補いながら、各センサータイプの強みを最大限に発揮します。たとえば、LiDARだけでは車線追跡の結果は悪くなりますが、LiDARとカメラの組み合わせは、これを達成するのに非常に効果的です。
適切な組み合わせは、いくつかの要因によって異なります。
- センサーに求める機能は何か例: 緊急ブレーキ、衝突回避、駐車支援
- この機能の要件は何か例: 100mの距離で車両を検出する必要がある
- この機能で遭遇する可能性のあるエッジケースはどれか例: 霧などの悪天候
- 求めている機能は運転支援向けか、または自動化向けか
- 最も手頃な価格で提供できるのはどのセンサーセットか
- センサーの必要数が設計全体にどのような影響を与えるか
シミュレーションによるセンサーの組み合わせのテスト
プロトタイプ車両が実際の環境に対応できるようにするためには、非常に多様なテストケースでセンサーを設計する必要があります。
Ansysのシミュレーションプラットフォームは、カメラ、LiDAR、レーダー、および超音波センサーの実動作に即した物理ベースのセンサー応答をリアルタイムで返すので、エンジニアは自動運転システムの設計の安全性を検証するために必要なすべての情報を入手できます。
設計探索の開始時にAnsysのシミュレーションを使用して、センサーの各組み合わせが実環境でどのように機能するかを正確に確認します。次に、目標に基づいて、プロジェクトに適したセンサーの組み合わせを評価できます。
物理ベースのセンサーシミュレーションを使用して自動運転車の安全性を向上させる方法の詳細については、オンデマンドウェビナー「大規模な物理ベースセンサーシミュレーションを使用して自動運転車の安全性を向上」をご覧ください。