

























ANSYS 部落格
February 24, 2022
自動駕駛車輛在雪地中如何「看」?
為了能夠安全行駛,自動駕駛車輛必須先能「看見」周遭世界。自動駕駛車輛可透過攝影機、光學雷達和雷達感應器的整合式系統,持續掃描環境以做出明智決策。但自主感應器被雪阻擋時會怎麼樣?
下雨和起霧對自動駕駛車輛來說是具挑戰的天候情況,但隨機下雪型態、每個雪花的屬性及雪花間的各種距離,更讓車輛在下雪時難以操控。如果感應器和障礙物間有又黏又冰且紊亂堆積的雪,可能會大幅降低車輛做出適當反應的能力。
根據美國聯邦公路管理局資料,美國有將近 70% 的人口居住在下雪地區。儘管加州擁有適合自動駕駛車輛的天氣,但實際上自動駕駛車輛仍需先克服雪上行駛的複雜問題,才能滿足多數美國人的需求。
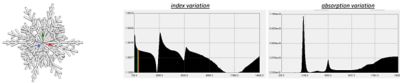
以 Ansys Speos 3D 紋理產生的雪花,以分析其光學屬性。
對自主感應器而言,在下雪時行駛為何如此困難?
下雪可能會在感知演算法嘗試處理感應器訊號的資訊時,造成演算法信心下降。此情況會導致無法偵測接近的物體,或會錯誤偵測到實際上不在該處的物體。
自主感應器在雪中的挑戰包括:
- 雪和其他物體之間缺乏對比,會導致無法偵測到物體
- 雪散射可能造成錯誤辨識物體位置、距離或角度
- 來自多個感應器的輸入必須互相同意彼此「看到」的內容,但雪會對每種感應器類型帶來不同問題,進而妨害感應器間達成共識
因為對比減少,因此雪也會降低側面車輛的偵測效果。
感應器準確度在雪地中有什麼影響?
不同感應器對雪有不同的不足處:
攝影機:能見度與對比降低
光學雷達:訊號散射、吸收與衰減,感知演算法收到低品質資料,以及假的結果
雷達:可偵測物體,但無法正確分類物體
讓自動駕駛車輛不受天候影響:工程師如何測試新的解決方案
為了打造可解決下雪無法預測性的自動駕駛車輛,工程師必須針對無數種駕駛情境,進行設計測試。工程師有幾種測試選項:
天氣實驗室:這類氣候控制設施提供可重複的天氣資料,但不考慮其他車輛和道路動態條件造成的天氣增強效果。
道路測試:在安全的直線路段上行駛會使自動駕駛系統暴露在真實天氣條件下,但由於技術快速發展,因此無法依賴此測試結果。
模擬:數位測試可以真實準確度建立無限個模型,減少實體原型製作的時間與成本,且不需等待大自然配合即可進行。
模擬如何協助自動駕駛車輛在雪地中看得更清楚?
模擬讓工程師能夠為無限種天氣和情境變數建模,提供更好的方法來測試與改進自動駕駛車輛在惡劣天候中的行為。運用模擬,就無需等待下雪。由於幾乎即時就能得到結果,因此自動駕駛汽車製造商可更快速地開發出具有天氣感知功能的自動駕駛系統。
模擬十分適合準確預測外太空和深海等嚴苛環境下的結果,但雪地則帶來獨特且複雜的挑戰。為了讓模擬能夠準確反應下雪的影響,模型必須考量每片雪花的形狀、大小、位置和光學特性 (即水是否清澈,或是否含有雜質)。此外,也必須考量行駛表面積雪區域的位置與形狀。
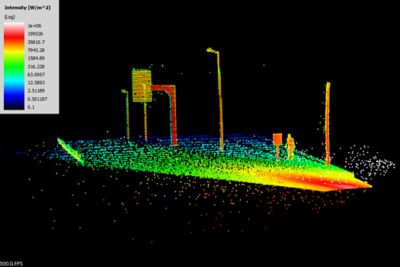

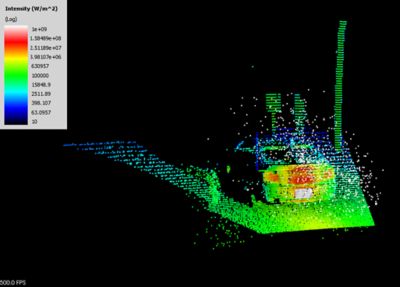
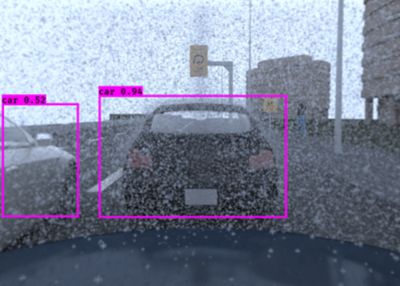
雪地中光學雷達 (左) 和攝影機 (右) 的長距離物理式感應器模擬。
Ansys Fluent 可用來執行雪的計算流體力學 (CFD) 模擬。此外,也可以使用 Fluent 分析由天候誘發的感應器髒汙、液滴影響和薄膜流動的轉換、起霧和表面凝結、結霜、結冰和除冰現象。CFD 模擬產生的高精度可再現天氣資料可匯出至 Ansys Speos,以進行攝影機及光學雷達模擬。
透過在結合 CFD 與光學的解決方案中使用 Fluent,AV 工程團隊可加快測試速度,有信心地整合混合能力感應器設計,並大幅強化在各種天候條件下 (即使是雪地) 的車輛感知能力。
若要深入瞭解模擬如何加速自動駕駛車輛的開發與測試,請閱讀自主感應器開發和要求 Speos 試用相關資訊。