

























自適應頭燈是什麼?
自適應頭燈結合多種技術,能夠根據環境調整頭燈的方向、照射距離、亮度以及光束模式,以在夜間提供更佳的照明效果,同時減少對其他駕駛的眩光影響。
常見的自適應頭燈系統主要分為兩種:自適應遠光燈 (ADB) 系統和自適應前照燈 (AFS)。這類頭燈透過攝影機、雷達、光學雷達、光感應器,以及天氣、車速與轉向資訊,動態調整燈光,以適應不斷變化的行車環境。
大多數自適應頭燈系統的功能可歸類為以下三種頭燈技術之一:
- 自動遠光燈:當前方沒有車輛時,自動開啟遠光燈;當偵測到其他車輛時,則切換回近光燈
- 彎道自適應頭燈:這是一種 AFS 系統,能夠根據車輛轉向角度調整單側或雙側頭燈的照射方向,使駕駛在過彎時獲得更清晰的視野
- 自適應遠光燈 (ADB):調整遠光燈不同區域的亮度,在無車區域提供更強的照明,而在有車輛的區域降低亮度
大多數新車都配備自適應遠光燈或可隨轉向調整照射角度的頭燈系統。歐洲已有採用光束調控技術的自適應遠光燈系統。美國國家公路交通安全管理局 (NHTSA) 最新採用的標準,已促使進入美國市場的汽車製造商和供應商競相開發符合新標準的產品。FMVSS 108 標準特別規範了使用模擬技術進行 ADB 虛擬認證。
自適應頭燈的優勢
大量數據顯示,車輛與車輛及車輛與行人之間的事故在夜間更為常見。高達 76% 的行人致命車禍發生在夜間。約 12% 至 15% 的交通事故將對向車輛頭燈眩光列為影響因素之一。新型頭燈系統可讓駕駛看得更遠、更清楚,對行車安全產生正面影響,行人與車輛碰撞事故最多可減少 23%。
這些數據促使特斯拉、奧迪、BMW、福特、本田、賓士、保時捷和豐田等汽車製造商積極研發新型自適應照明技術。目前,這項技術尚未被強制要求。儘管如此,汽車業仍將各類自適應頭燈視為提升安全性並在競爭激烈的市場中突顯新車優勢的重要技術。
自適應頭燈的運作原理?
頭燈不再只是單一近光燈和遠光燈搭配反射器,並依靠手動開關來控制開啟或關閉。現代頭燈已進化為具備軟體控制、複雜結構與車輛網路接口的先進系統。
為了實現自動遠光燈、轉向照明和光束調控,各車廠採用不同的配置與系統名稱,但主要元件大致可分為以下幾類。
感測器
各種感測器收集資訊,包括轉向、車速、光照狀況、天候、行車狀況、道路寬度及其他車輛的位置。新款車型也開始利用 GPS 位置與地圖數據,主動提供資訊給系統。感測器中較複雜的可包含光學或熱成像/紅外線攝影機,以及車輛已配備的雷達、光學雷達或聲納測距裝置,以支援其他安全系統。這些裝置能偵測物體的大小、位置及速度,特別是來車。較簡單的感應器則負責偵測方向盤位置、環境光照狀況及天氣資訊。ADB 系統的準確運作仰賴感應器與 ECU 之間的精確回饋機制,以確保系統能執行所需調整。
軟體與電子元件
感測器收集的資訊會傳送至自適應頭燈控制硬體,使控制軟體能根據當前狀況調整系統運作。電子元件可整合至頭燈組件、獨立控制單元或車輛控制電腦。除了負責控制運作,軟體與電子元件還需提供適當的電壓、脈衝寬度調變 (PWM) 及電源品質,以確保頭燈系統正常運作。
頭燈組件
自適應頭燈系統的核心組成主要是頭燈組件本身。控制系統負責指示頭燈組件調整轉向角度、各光源亮度,以及自適應遠光燈的明暗區域。最重要的是,頭燈組件內含光學照明路徑。工程師透過大量模擬與原型設計來最佳化頭燈組件的光學特性。
以下是頭燈組件中各子元件的說明:
外殼
頭燈組件安裝於密封外殼內,與車輛前端一體化設計,並可作為整組模組更換。
透鏡與反射器
每個光源的光束形狀與品質,透過外殼前方的光學透鏡或光源後方的反射器進行調整與塑造。部分反射器具備自適應功能,可根據系統指令調整或傾斜角度。
致動器
許多自適應頭燈系統透過步進馬達或致動器來調整光路內部元件,或改變整個頭燈組件的照射方向。頭燈組件中的致動器必須具備足夠的耐用性,以承受車輛震動、極端氣候條件,以及長時間的日常使用。
光源
光源是自適應頭燈系統的核心。光源可由單個或多個鹵素燈泡、氙氣燈、LED 燈、矩陣式 LED 頭燈,或部分新車採用的雷射光源組成。光源類型決定了成本、光色及亮度。各種光源各有優缺點,但 LED 燈泡與矩陣式光源的控制精度與亮度表現,使其成為目前的主流選擇。
光束調控
光束強度的調整可透過多種技術實現。透過選擇性發光或遮光來形成所需的光束模式。以下是幾種常見的方法:
- 遮光:最簡單的方法是使用可動式遮光片,當偵測到來車時,阻擋光束上方區域以關閉遠光燈,遮蔽特定車輛,或防止光線照射到路旁。固定式 LCD 濾光片可安裝在光源與透鏡之間,選擇性遮蔽部分光束。
- 微鏡:這種光束調控系統類似數位光處理 (DLP) 投影技術,透過後向光源將光線投射到微鏡陣列,再反射出符合需求的亮度模式,經透鏡投射到前方。此技術不僅能實現選擇性遮光,還可用來在車前路面投射訊息。
- 矩陣式 LED:最常見的光束調控技術,即所謂的自適應 LED 頭燈,採用由多顆小型高亮度 LED 組成的矩陣式排列。每顆 LED 都可作為獨立像素,根據需求調整亮度或降低光輸出。
散熱管理系統
無論什麼光源類型,產生高亮度光線都會伴隨大量熱能。然而,相較於舊型光源,LED 等新型光源產生的紅外線能量較少,過去透過這些熱能來融化透鏡上的雪與冰的效果因此降低。因此,穩定運作的自適應頭燈系統必須具備有效的熱管理機制,確保光源、電源系統與電子元件維持適當溫度,同時將廢熱導引至透鏡組件。
模擬技術如何驅動自適應頭燈設計
設計自適應頭燈系統的工程師,無論是基本的自動遠光燈輔助或最新的 AFS,都需應對多項重大挑戰:
- 車輛震動與衝擊
- 封裝
- 反應時間
- 眩光
- 光源位置與光束模式
- 散熱管理
- 熱循環管理
- 系統整合
- 安全標準
- 效能最佳化
- 成本控制
- 系統驗證與夜間行駛測試
大多數車廠已將模擬導向的產品開發納入設計流程,以克服這些挑戰並最佳化持續進化的自適應頭燈系統。模擬技術在自適應前照燈系統中的常見應用方式包括:
元件光學設計與最佳化
模擬技術可用於建構光源、透鏡以及頭燈組件內的主動與被動反射器模型。許多頭燈專家使用 Ansys Zemax OpticStudio 軟體來最佳化各元件及光學組件。該工具的參數化設計、直覺式介面與高速運算能力,使工程師能夠輕鬆分析自適應系統可能遇到的各種光學情境。
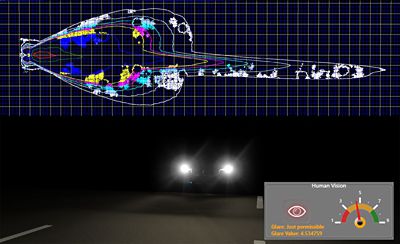
可自訂的等照度線與區域 (上圖) 及不適眩光模擬 (下圖)
虛擬光學效能可視化
當元件光學設計完成後,工程師可將生成的光束導入 Ansys Speos 軟體等系統級建模工具,模擬駕駛在行駛過程中的實際視野。透過模擬各種行駛條件,可在原型製造前先行驗證系統效能。進一步而言,Ansys AVxcelerate Headlamp 軟體等即時模擬工具可讓完整系統進行虛擬夜間駕駛測試,評估其在各種行駛情境下的運作表現。開發 ADB 系統最昂貴且耗時的步驟之一就是夜間測試。透過模擬進行駕駛測試與驗證,可大幅降低成本與時間。
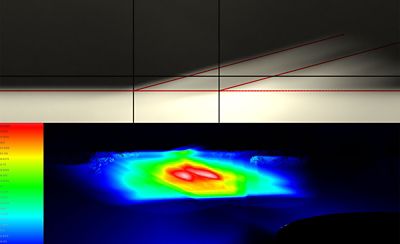
校正牆面 (上圖) 與互動式亮度/照度模擬 (下圖)
機電設計與最佳化
連接器、致動器、頭燈元件、電子模組與電源系統等組件,皆需承受電氣與機械負載,可透過以下工具在設計初期進行分析與最佳化:
- Ansys Mechanical 軟體可用於分析機械元件與組件
- Ansys Sherlock 軟體可用於電子組件的可靠性分析
- Ansys Maxwell 軟體可用於馬達與致動器的電磁設計與分析
熱管理可透過 Mechanical 軟體、Ansys Icepak 軟體或 Ansys Fluent 解決方案進行模擬。
控制軟體驗證與確認
由於控制軟體是自適應車輛系統的核心之一,可使用 Ansys SCADE Suite 環境等工具來建構與開發頭燈控制軟體。搭配 AVxcelerate Headlamp 軟體等模擬工具,可在各種情境下驗證與測試控制軟體的運作,並進行法規要求的虛擬評估。