

























Ansys Blog
October 24, 2019
3 Autonomous Vehicle Testing Challenges Solved with Simulation
Autonomous vehicle (AV) testing and validation is vital to the future prospects of making AVs available to consumers for their daily transportation needs.
Engineers will need to meet high standards to get autonomous vehicles on the road. But traditional prototype-based testing takes time and large budgets.

Engineers need to use virtual testing
environments to complete autonomous
vehicle testing and validation within a
reasonable time frame
If fully autonomous vehicles are to become a reality anytime soon, engineers need to take advantage of physics-based simulations and virtual reality simulations for autonomous vehicle testing. These digital tools will enable engineers to overcome the top three challenges (discussed below) to test and validate autonomous vehicle designs.
Engineers can access one of these tools thanks to a partnership between Ansys and AVSimulation. The partnership aims to integrate simulation and virtual reality (VR) through the Ansys VRXPERIENCE Driving Simulator powered by SCANeRTM.
Challenge 1: Advanced Scenarios
Traffic can be erratic. When autonomous vehicles become mainstream, they will encounter unique scenarios every day.
Think of it: A car running a red light, driving on the wrong side of the road or popping onto a sidewalk are rare occurrences for an individual. However, on a global scale, they happen regularly.
Testing an autonomous vehicle’s reaction to these scenarios using prototypes would be impractical. On-road prototypes would rarely experience these conditions and setting up the scenario would be dangerous and costly.

Autonomous vehicles will need to
be tested for unique scenarios.
But physical prototypes will not
experience these conditions on a
regular basis
Instead, testing and validating autonomous vehicles in these unique scenarios can be done using simulation. These simulations will be fast and cost-effective, and will eliminate risks to prototypes, drivers and pedestrians.
Challenge 2: Everyday Traffic, Conditions and Signage
Engineers can’t ignore the mundane, day-to-day aspects of driving any more than they can ignore unique scenarios.
Stopping at a stop sign becomes second nature to a human driver, despite various permutations of the scenario.
Weather, road conditions and traffic can all affect how stopping at that stop sign plays out.

Autonomous vehicle testing and
validation of various permutations
of a traffic scenario
Even the car’s engine and tires can add variables to the situation. Humans are generally good at adapting to these scenarios.
Vehicles controlled by artificial intelligence (AI), on the other hand, are not so cut and dry. They need to be tested for every conceivable iteration of this stop sign setup.
Physically testing these scenarios can also be risky to human life and equipment. Additionally, the repetition involved in the comprehensive testing of all these scenarios could lead to human errors.
Engineers can explore the autonomous vehicle’s domain of validity using parameterization, simulation and virtual reality. This way, computers run through multiple permutations of the stop sign scenario automatically, in a fraction of the time.
Challenge 3: Sensors and Sensor Arrays
Autonomous vehicles need a wide array of sensors to get a clear picture of the world around them, including cameras, lidar, radar, thermal cameras and more.
One challenge is testing these arrays in scenarios where one, or multiple, sensors fail.
Testing autonomous vehicles with simulations can model faulty sensors to determine how the autonomous vehicle will handle, for example, the failure of a front facing camera, so engineers can quickly determine whether the autonomous vehicle is functionally safe.
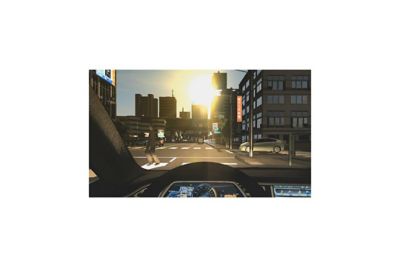
Glare can affect various sensors in an
autonomous vehicle. The sensor array
can be tested and validated under
these conditions using simulation
Software Enables Engineers to Conduct Autonomous Vehicle Testing
A strategic partnership between Ansys and AVSimulation aims to make the development, testing and validation of autonomous vehicles faster and safer.
The key is to integrate the simulation and virtual reality tools of AVSimulation’s SCANeRTM and Ansys VRXPERIENCE.
Learn more about Ansys autonomous vehicle simulation solutions.