

























ANSYS BLOG
September 25, 2018
Optimizing Autonomous Vehicle & ADAS Radar Systems in a Virtual World
The average driver has two eyes on the road — most of the time. However, your average autonomous vehicle or advanced driver-assistance systems (ADAS) can have five, or even six, radar systems continuously monitoring traffic and road conditions.
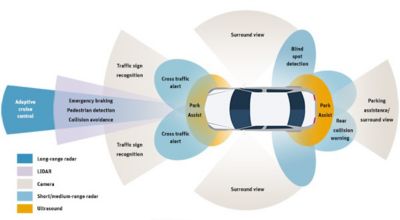
Autonomous cars and ADAS could have up to five or six systems monitoring the road.
These sensors don’t take a break to change the radio or play Pokémon Go. As soon as something happens they see it and they tell the car to evade any potential threat with superhuman speeds.
Theoretically, this autonomous vehicle radar system can be a much safer driver than anyone.
How Accurate are ADAS & Autonomous Vehicle Radar Systems?
But, how accurate will these ADAS radar systems be?
“In the future, radar will likely have a significantly higher degree of functionality, with the ability to image the road scene, detect and track objects or obstructions. They could even locate safe paths through unfolding hazards,” says Laila Salman, lead application engineer at Ansys.
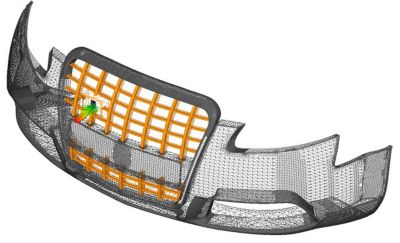
A radar sensor array installed on an automobile fascia.
“These radars,” she adds, “will be able to monitor road conditions — even locating and reporting potholes and debris on the road.”
Engineers use simulation software to ensure this level of safety from autonomous vehicles and their radar systems.
“I evaluated a candidate design for a front-mounted medium-range 77 GHz radar system,” notes Salman. “Simulation demonstrated that monitoring forward traffic and objects at 50 m (164 ft) accurately predicted the location of the object to 0.1 m (4 inches) and its velocity to 0.2 m/s (0.45 mph).”
Salman found that the bumper, fascia, grill and the sensor’s location could all affect the accuracy of the detection device. Even the materials of these car parts, their paints/lacquer layers and the weather could make it more difficult to detect objects and their speeds.
“The antenna design must tightly control the distribution of radiation energy, focusing it on the areas of the road under observation and minimizing energy broadcast to locations that are not of interest to the sensor,” says Salman.
Using simulation software, Salman can determine the optimal location for each sensor in an autonomous vehicle radar system.
How Virtual Worlds Validate ADAS & Autonomous Vehicle Radar Systems
Simulation software helps to develop and validate these radar systems and their interactions with various parts in the car within a digital world.
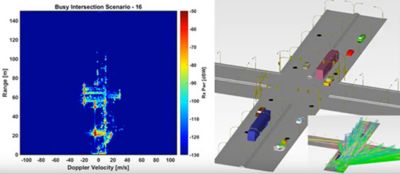
A range-Doppler map based on the tests of a radar system within a digital world.
The simulation uses shooting-and-bouncing ray analysis techniques to virtually evaluate the performance of an ADAS radar system.
In other words, this simulation determines how the virtual radar system detects other virtual vehicles, stationary objects and road conditions on a virtual street. Pretty cool.
The system then tests the signals and target indications that would be returned by the ADAS radar system. The system’s performance can then be displayed as a series of range-Doppler maps.
“This is a powerful technique for evaluating radar performance and evaluating it in a complete simulation loop involving the radar sensor, detection algorithms, advanced safety systems, vehicular control systems and vehicle dynamics,” explains Salman.
Learn More
To learn more about how virtual worlds can evaluate autonomous radar systems, join Salman at EDI CON for her presentation mm-Wave Antenna Array Modeling for Autonomous Vehicle Radar Applications.