
























什么是激光雷达?
激光雷达(即光探测与测距)是一种使用光脉冲绘制环境图的遥感技术。激光雷达在家庭安全系统、条码扫描器和面部识别系统中都有所应用,但最广为人知的,可能是其在推动完全自动驾驶发展中的重要作用。与雷达和声纳等同类技术不同,激光雷达可提供高分辨率3D数据,因而成为了汽车、地质和农业等行业的重要工具。
激光雷达、雷达与声纳
20世纪初,雷达(无线电探测与测距)和声纳(声音导航与测距)被用于测量距离——前者使用电磁无线电波,而后者使用的是声波。然后,平地一声惊雷起,随着激光器在20世纪60年代问世,一种利用光子学强大功能的全新距离传感系统应运而生。激光雷达能够以光速测量、绘制和解读我们所处的世界。
不同距离传感系统的对比情况如何?
| 雷达 | 声纳 | 激光雷达 |
传感方法 | 电磁无线电波 | 声波 | 电磁光波 |
常见应用 | 空中交通管制、天气预报 | 海上导航、水下绘图、考古 | 自动驾驶汽车、地面绘图、机器人 |
优势 |
|
|
|
弱点 |
|
|
|
激光雷达的工作原理是什么?
所有激光雷达系统都由三个主要部分组成:用于发射光波的发射器、用于捕捉反射光波的接收器以及用于解读数据的处理器。在极短的瞬间,数千个脉冲光波可以击中物体、反弹回来,并提供精确的时序数据,从而准确地解读环境中的目标物体及其当前状况。
激光发射
发射器以186,000英里/秒的速度在空气中发射短脉冲激光
光探测
当激光脉冲击中物体时,一小部分光线会被反射回接收器
数据处理
处理器测量光的传播时间,计算到物体的距离,并将数据转换为详细的3D地图和模型
通过快速使用多个激光发射器和脉冲光(每秒数十万次),激光雷达系统能够在较宽的视场内从不同角度捕获测量值。3D地图结果可提供有关位置、距离和移动的精确信息。
激光雷达的用途是什么?
向空中发射激光的想法似乎非常科幻,但其实现在激光雷达已是被用于各行业和应用的常见技术,其应用包括:
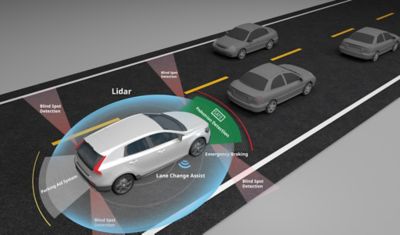
自动驾驶
激光雷达与摄像头和雷达传感器一起工作时,能够为自动驾驶汽车的安全导航提供必要的数据。通过创建车辆周围区域的3D地图,激光雷达可收集有关物体形状、大小和位置的精确信息,从而能够探测道路标志、其他车辆、障碍物和行人。此外,激光雷达的远程精度还使自动驾驶汽车能够跟踪车道并有助于防止碰撞。
计算机视觉
为了从图像和视频中获得有意义的结果,计算机需要获取更多的细节,但单独摄像头所能提供的细节有限。而通过将深度信息与图像融合,激光雷达提供的数据使计算机能够识别和解释视觉世界。激光雷达辅助的计算机视觉通常用于增强现实、手势识别(游戏)和医疗监控。
面部识别
在需要面部识别进行身份验证的系统中,激光雷达可提高准确性并减少欺骗。激光雷达提供的非常详细的点云包含有关面部结构中的轮廓和尺寸的精确数据,有助于系统区分真实面部和2D图像。由于激光雷达使用自己的光源,因此它可以在弱光条件下(甚至在黑暗条件下)绘制面部图。
机器人
与自动驾驶汽车类似,机器人依靠激光雷达来帮助其安全地导航周围环境。激光雷达的详细3D地图可为机器人提供所需的精确数据,以便在繁忙和不断变化的环境(如仓库和工厂)中快速做出明智的路线决策。此外,激光雷达还有助于增强机器人在制造、农业以及搜索和救援等复杂情况下工作时的对象识别和操作能力。
大多数人最开始都是通过自动驾驶了解到了激光雷达。而该技术的终极目标是实现L5级自动驾驶(即在任何场景中,自动驾驶系统都能够表现得像人类操作一样)。为实现这一目标,需要多种类型的传感器协同工作,包括摄像头、雷达、超声波和激光雷达。不过,鉴于激光雷达的精度和范围(例如,可以清晰地探测到200米以外的物体),人们普遍认为其在碰撞和障碍物规避方面的作用至关重要。
激光雷达的类型
有几种类型的激光雷达可用于自动驾驶,包括扫描、旋转和闪光。此外,虽然当前大多数的激光雷达系统都使用飞行时间(ToF)探测技术,但许多新一代系统都考虑利用调频连续波(FMCW)探测。
制造商可以使用单个类型的激光雷达,也可以同时使用所有类型。在车辆以外的其他领域,可选择的激光雷达类型也在不断增加,能够支持范围、机动性和环境方面的特定需求。
下面是一些用于描述激光雷达系统的常见术语的定义:
- 旋转激光雷达:这涉及旋转光源来捕捉整个场景中的图像。旋转由机械方式驱动(即自动驾驶汽车顶部常见的旋转结构)。
- 扫描激光雷达:这涉及使用先进技术(如相控阵列、衍射光学器件和超表面),而不是通过机械旋转来捕获整个场景中的图像。这通常也称为“固态”激光雷达。
- 闪光激光雷达:这涉及使用光源阵列在单个“拍摄”中捕获整个场景中的图像(与相机上的闪光灯非常相似)。虽然该技术比旋转激光雷达更可靠,但它通常适合在距离较短的范围内工作。
- ToF探测:这种激光雷达探测方法,通过飞行时间(即光源发射到接收器探测到光源之间所需的时间)来确定到目标探测物体的距离。
- FMCW探测:这种激光雷达探测方法,以稍微不同的频率向场景发送多个光束,并测量它们之间的相干性,从而确定到物体的距离。如果考虑对同时运行(例如其他汽车上)的其他激光雷达的影响,这种方法比ToF探测更为可靠(更不易对其他激光雷达系统数据造成损坏),但其需要更多的计算处理。
- 机载激光雷达:这是在飞机、直升机和无人机等机载交通工具上运行的激光雷达系统。
- 地面激光雷达:这是在卡车等地面车辆上运行的激光雷达系统。
激光雷达的优势和挑战是什么?
在速度和准确性占主导地位的应用中,激光雷达是首选技术。但是,只要激光雷达这种传感方法的成本一直居高不下,它就仍然可能在普及应用的过程中面临阻力。
激光雷达的优势 | 激光雷达的挑战 |
卓越的精度 | 成本高 |
激光雷达的未来
随着各类技术对速度和准确性的需求不断提高,激光雷达在系统中的集成将不断增加。由激光雷达所带来的创新将塑造医疗、交通和农业等日新月异的行业的未来。
为了实现更高水平的激光雷达功能,工程师和制造商需要利用仿真的预测性洞察。借助光学和光子学软件,如Ansys Speos、Lumerical、Zemax和AVxcelerate,设计人员可以探索多种场景,以准确预测激光雷达的运行情况,通过仿真、测试和验证,助力光驱动的创意加快向前发展。
值得关注的激光雷达趋势:
- 智能城市规划
- 无人机(UAV)
- 环境研究和保护
- 可穿戴集成
无论是寻找穿过街道的行人还是遍布城市的排水口,激光雷达都能以惊人的准确性和速度,洞察我们周围的一切。通过在各技术领域充分发挥激光雷达的强大功能,未来的许多重大发展指日可待。