
























Ansys博客
September 27, 2023
航空自主飞行:利用AI/ML和仿真设计更安全的系统
和电气化一样,自主控制也已成为从制造和工业设备到汽车和航空等各个行业的主要趋势。事实上,2019年全球自主飞行飞机市场规模估计为45.6亿美元,预计到2027年将超过160亿美元。因此,先进空中交通(AAM)公司正在开发自主飞行飞机,以更有效地在各地之间运送人员和货物。城市空中交通(UAM)和区域空中交通(RAM)是AAM的子集,虽然这两个术语通常可以互换使用,但它们分别侧重于城市和郊区较低高度的空中交通。
毋庸置疑,构建安全的自主飞行AAM系统需要复杂的训练、工程、开发和设计。人工智能/机器学习(AI/ML)通过帮助工程师和设计人员开发关键感知和决策功能,为这些领域提供了巨大助力,而这些功能是实现自主飞行的基础。然而,AI/ML无法在这些自主飞行功能的训练和验证中体现对现实世界的反馈,这就带来了挑战和担忧。
仿真则在帮助建立对自主飞行AAM系统的信心、确保其可靠性和验证其安全性方面具有不可估量的价值。在早期阶段,仿真可提供关键洞察、预测准确性和彻底分析,为训练和开发提供信息。在后期阶段,仿真可提供逼真的环境和场景来验证和测试这些功能。通过集成Ansys解决方案,AAM公司可以采用无缝的端到端工作流程,使用仿真和数字任务工程工具进行安全性分析、嵌入式软件、传感器测试等,以优化训练和验证。
增强自主飞行中的感知和决策
在航空领域,自主飞行既有新的应用,也有传统的应用。新的应用以新一代AAM运输为中心,涉及通常体积较小、高度自主飞行的飞行器,可在低空运载乘客或货物。一般来说,这些系统(尤其是UAM系统)依赖于直升机等技术或电动垂直起降(eVTOL)等新兴技术。
相比之下,传统应用是在现有系统中实现的。例如,商用飞机制造商可能采用自主飞行技术,以提高飞行员的态势感知能力,减轻飞行员的责任和工作量,或优化各个飞行阶段的效率。同样,军用飞机供应商可能会考虑采用自主飞行技术来协助飞行员处理任务期间的意外变化,例如新目标或恶化的条件。
通常,自主飞行应用必须包含三大主要功能,这些功能相互影响,具体如下:
- 感知:观察环境,包括迎面而来的障碍物(例如,其他飞机、与天气相关的障碍,或飞行路径上的其他障碍)。这通常是通过安装在摄像头、激光雷达或雷达上的传感器来实现的。
- 决策:根据对这些障碍物的感知和检测,确定最佳和最安全的飞行操作。
- 执行:执行上述环节中确定的理想飞行操作。
实际上,自主飞行系统需要建立可靠的感知和决策功能,才能成功执行,仿真则为这两个领域带来了重要价值。对于感知训练,基于物理的仿真可提供原始传感器数据和地面实况信息,这样就无需进行复杂的图像处理,从而缩短训练时间,并提高准确性。对于决策培训,仿真可提供灵敏度、鲁棒性和可靠性分析,有助于提高飞行性能、飞行操作的安全性和避免碰撞的能力。
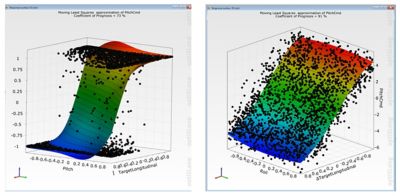
通过在Ansys optiSLang中进行灵敏度分析,确定并解决了振荡问题(左),以实现更平稳的飞行(右)。
仿真还改进了强化学习(RL),这是一种AI/ML训练技术,使模型能够通过试错自主学习。换言之,与监督式学习或非监督式学习不同,RL使AI/ML代理能够通过来自其环境的反馈进行交互式学习,包括其自身在该环境中的行为和体验。因此,仿真通过提供创建多种(近乎无限数量)仿真环境的机会,极大地支持了RL训练,这反过来又提高了感知和决策训练的质量。
自主飞行应用
Ansys可提供完整的基于模型的系统工程(MBSE)工作流程,以帮助训练和验证自动驾驶功能,包括仿真、系统架构、传感器测试、安全评估和运行设计域(ODD),以及场景创建、变化和结果分析。
首先,让我们了解一下该工作流程中使用的关键工具:
- Ansys medini analyze:一款基于模型的集成工具,支持电气、电子和软件控制系统的安全性分析。其支持一致且高效地应用行业指南,专门针对ISO 26262、IEC 61508、ARP 4761、ISO 21448和MIL-STD-882E等行业标准进行定制。
- Ansys optiSLang:一款流程集成与设计优化工具,可解决基于计算机辅助工程(CAE)的鲁棒性设计优化(RDO)所带来的挑战。
- Ansys系统工具套件(STK):一种系统之系统仿真器,使您能够在逼真的时间动态3D仿真中对复杂系统进行建模,包括高分辨率地形、图像、射频(RF)环境等。
- Ansys AVxcelerate Sensors:传感器测试和验证工具,使您能够使用逼真的场景来研究雷达、激光雷达和摄像头传感器在模型在环(MIL)、软件在环(SIL)或硬件在环(HIL)环境中的感知。
- Ansys SCADE Suite:一个基于模型、可靠的嵌入式软件开发环境,其可提供涵盖需求链接管理、基于模型的设计、验证、认证代码生成功能等方面的工具链。
实施Ansys SCADE和Ansys AVxcelerate Sensors,以配置仿真并验证自主飞行功能。
现在,让我们通过六个步骤来探索此工作流程的实施示例:
- 在medini analyze中,定义系统架构、环境、ODD(功能运行的条件,包括与天气相关的现象)以及一组贯穿ODD的功能场景。
- 使用optiSLang,将功能场景定义为逻辑(参数化)场景。
- 使用实验设计(DOE)将逻辑场景更改为具体场景,其中参数值遵循与现实相对应的概率分布。
- 根据STK中运行的仿真组合,使用具体的场景来训练自主飞行功能,对运行中的整个系统之系统进行建模;使用AVxcelerate Sensors测试和验证传感器;SCADE用于关键嵌入式软件;还可能会使用外部AI/ML训练工具,例如YOLO或OpenAI。
- 返回到optiSLang,通过灵敏度和鲁棒性分析来评估生成的神经网络。
- 最后,集成全自主飞行功能(感知、决策和执行),并使用optiSLang评估仿真结果,以进行基于自适应采样的可靠性分析,从而有效地探索设计空间。
通过集成上述Ansys工作流程示例的部分或全部内容,航空业的工程师和设计人员正在开发和验证更安全、更可靠的自主飞行系统。
使用Ansys STK中的系统之系统仿真来训练和验证您的自主飞行功能。
在一个案例研究中,一家飞机制造商正在集成Ansys解决方案,以确保无人机(UAV)避免发生碰撞。自动驾驶eVTOL必须飞往航路点,同时避免与障碍物相撞。该团队已经对飞机的感知功能充满信心,他们最关心的是eVOTL确定最佳飞行路径的决策能力。
在另一个示例中,一个航空单位正在采用类似的Ansys工作流程来进行编队飞行。一支由四架自动驾驶eVTOL组成的机队必须跟随一架有人驾驶的eVTOL进行编队飞行。该示例同时涉及感知(检测领头的eVTOL和其他飞行器)和决策(跟随领头的eVTOL,同时避免任何碰撞)。
在AVxcelerate Sensors中改进用于编队飞行的安全关键型自主飞行感知和决策功能。
为新一代AAM做好准备
Ansys的仿真解决方案使客户能够安全地训练、测试和验证关键的AAM应用,从而对AI/ML辅助软件和嵌入式系统中的自主飞行技术树立信心。此外,通过结合使用Ansys的高保真度仿真和数字任务工程工具,客户可以在逼真的时间动态3D环境中开发和验证这些系统。
如欲了解有关Ansys自动驾驶解决方案的更多信息,请注册观看网络研讨会点播视频“Ansys Autonomy:通过基于模型的软件解决方案实现嵌入式规划和控制自动化。”
如欲探索medini analyze、optiSLang和SCADE,请点击此处浏览免费产品试用。如欲体验STK的系统之系统仿真功能,请点击此处了解免费试用选项。