

























ANSYS BLOG
June 10, 2021
Get High-Fidelity Optical Edge Case Analyses With Lidar Simulation
Advanced driver assistance systems (ADAS) and autonomous vehicles (AV) rely on heavily on four main sensor modalities for perception: radars, cameras, ultrasonic and, most recently, lidars (light detection and ranging). Lidar is a crucial sensor to the ADAS toolset because it can measure precise three-dimensional images (point clouds) of everything from cars to traffic lights to pedestrians in a wide range of environments and under diverse lighting conditions.
In ADAS, robust and dependable detections are paramount. Nevertheless, with every sensor technology specific conditions can cause false detections to occur. It is crucial to understand these limitations, especially when safety is concerned. This is no different for lidar: Edge case detections do occur. High-fidelity simulations of lidars can help in many ways by providing an in-depth understanding of edge cases to optimize a lidar design. Generating representative simulated data with all the characteristics of a real-world measurement also allows for virtual benchmarking and packaging analysis.
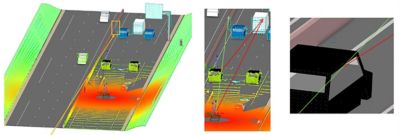
Simulated ghost image of a truck caused by a specular windshield
To properly capture these lidar edge cases in simulation, including ghost reflections due to specular objects in a scene or beam, or detections of near objects due to the spatial divergence of a source, two things need to be considered for each source pulse:
- Multiple ray paths need to be cast into the simulation scene with respect to the spatial intensity distribution of the source.
- Multiple bounces along the ray path need to be captured.
Most lidar simulation software is limited to casting one ray or only a few rays into the scene per source firing and do not consider multiple bounces along the path. This is not enough to capture the edge cases mentioned above. Additionally, simulation software should use a full 3D environment and accurate material properties to enable engineers to faithfully recreate various edge case scenarios
The Need for a High-Fidelity Monte Carlo Optical Lidar Simulation
A simulation tool that is not limited in ray casting or bounces can be used to physically model most edge cases and allow for correct weather modeling in conditions such as fog and rain. In such conditions, several hundred bounces per ray path are needed to correctly model the impact of these diffuse mediums on the signal’s time of flight (ToF).
Ansys Speos is not limited in ray casting or bounces. The number of rays cast per source pulse can range in the hundreds to the billions and the path bounces have no set limit. This Monte Carlo approach to simulation allows Speos to capture multiple lidar edge cases in simulation, including the implications of lidar behind a windshield, ghost images caused by highly specular objects, propagation in light diffusive mediums like fog and rain, the impact of spatial beam intensity distribution and much more.
Speos leverages a full 3D environment for simulation, allowing engineers to include the geometry of the subject vehicle with material properties for the target.

A simulated drop in intensity return (left: without windshield, right: with windshield) due to Fresnel reflection on the windshield.
To learn more, request our on-demand webinar: High-Fidelity Lidar Analysis and Packaging with Ansys Speos.