


























ANSYS BLOG
April 10, 2024
Understanding the Calculus Behind EV Range: How Far is Far Enough?
See how the COVESA EV Power Optimization project uses simulation to develop a battery power-saving app to extend EV driving range
Next to pricing, range anxiety — or the fear running out of battery power on the road — is a major psychological barrier to electric vehicle (EV) ownership. The limited number of miles most can travel on a single charge, plus the lack of public infrastructure and fast charging stations available, is fueling consumer distrust and slowing the rate of adoption.
But what if there was an EV power management app that could recoup enough power along the way to help you reach your destination? The COVESA EV Power Optimization project, a collaboration between Hyundai-Mobis, digital.auto, Bosch, Ansys, and Ferdinand-Steinbeis Institute, is developing one to do just that. This use case is part of a larger objective by digital.auto.initiative, an open community of car manufacturers, suppliers, start-ups and end-users working together to create the next generation of software-defined vehicle experiences.
One App. A Range of Possibilities
Most of us are used to thinking of range in terms of miles per gallon, or just how far we can travel on a tank of gas. Instead of gallons used, EV range is measured in kilowatt-hours (kWH). Range is assigned to an EV by both the original equipment manufacturer (OEM) and government agencies (EPA). It represents theoretical distance.
In the real world, that distance can vary based on any number of factors related to vehicle systems, driver behavior, or other external factors.
For example, when the weather changes, up to 25% of an EV’s range is lost to heating, ventilation and air conditioning (HVAC). That’s because most of the heat coming off a gas-powered vehicle is used to heat the cockpit, whereas EVs exclusively rely on electricity to manage climate control, contributing to battery drain. Additionally, individual driving habits like heavy acceleration also have an impact on battery life.
To mitigate energy loss from these and other factors, the COVESA EV Power Optimization project is proposing a solution that can constantly monitor an EV’s state of charge (SOC). Once a range issue is identified, the application can then take appropriate measures to extend vehicle range by powering down noncritical systems in the vehicle as SOC goes down.
Specifically, a drop in SOC would trigger a driver alert, followed by a powering down of certain vehicle systems — all without having to stop and recharge. These actions may include lowering radio volume and HVAC settings or dimming interior lighting.
“The idea of this project is that the EV will behave more like a smartphone that offers users a ‘power save’ mode if battery charge levels are dropping before a certain point,” says Professor Dirk Slama, vice president, Strategic Ecosystems (C/IDP) at Robert Bosch GmbH. “Similarly, our project will enable EV drivers to go the extra mile to reach their next destination.“
Integrating digital.auto and Ansys via COVESA Vehicle Signal Standards
Initially, the goal of the project was to realize and digitally validate new power optimization policies and algorithms that would support a power-save mode for EVs to reduce range anxiety. To arrive at this solution, the team followed digital.auto’s “#digitalfirst” approach. Working within the digital.auto playground (a virtual development environment), a power-savings algorithm was implemented against vehicle signal standards-based COVESA vehicle APIs.

digital.auto’s “#digitalfirst” development approach pictured above takes a "shift left" approach focused on accelerating software product development based on virtual prototypes of associated hardware via digital twins.
In order to get a realistic virtual test environment without having to build a test vehicle, Ansys Twin Builder was used to create a physics- and data-based high-fidelity EV power consumption system digital twin. This virtual system representation helped validate power optimization algorithms and policies.
For the actual power savings application, the digital.auto playground was integrated with the digital twin via COVESA Vehicle Safety Standards (VSS) APIs. This enabled the successful exchange of vehicle signal data like speed and acceleration between the digital twin and the development environment. Using on-the-fly synchronization with the digital.auto technology on the front end enabled feedback sharing of vehicle parameters like SOC and range.
In this way, the digital.auto playground enabled the use of real-world COVESA vehicle APIs to integrate everything in a cloud-native environment, supporting spontaneous optimization. Ultimately, vehicle virtualization using digital twin simulation via Twin Builder was a key driver in making the software-defined vehicle (SDV) philosophy a reality in its ability to test and validate an entire EV ecosystem across multiple domains.
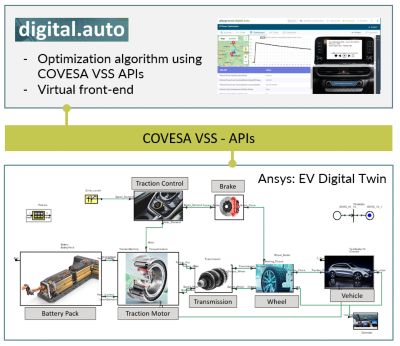
Ansys EV digital twin integration with COVESA VSS and digital.auto. The digital.auto platform hosting the Covesa APIs appears on the front end while Ansys EV digital twin is operating on the back end.
Multiple Simulation Solutions Help Digital Integration Take Shape
Twin Builder enabled the quick creation and integration of system models that could later be deployed as a digital twin or systems-of-systems model that encompassed the entire EV. To do this, multiple systems were first captured as individual models. These include reduced-order models (ROMs) for more complex systems such as motor, battery, and HVAC systems, which are abstract models of high-fidelity computational ones.
Specifically, Twin Builder was coupled with other Ansys physics-based simulation solutions to bring the detail of 3D simulations as ROMs into context, which generated more accurate, efficient system-level models. To this end, the software used ROMs produced from Ansys’ structural, fluids, electromagnetics, and semiconductor products to model mechanical assemblies, electromagnetic actuators and machines, circuit and cable parasitic, thermal networks, and signal integrity.
The resulting digital twin can be deployed as a containerized app in any industrial internet of things (IIoT) platform and linked to any asset through a standard API like COVESA APIs. When integrated into rapid prototyping platforms like digital.auto, it can provide real-time outputs and commands that prompt a real-time response aligned to the latest conditions and system responses, with the goal of identifying opportunities to extend real-time range.
Ultimately, the integration of virtual hardware with real hardware results in an automotive-grade system design. The test hardware is based on the digital.auto dreamKIT, an open-source design for SDV/COVESA test hardware that can accommodate prototypes deployed from the playground automatically.

Pictured above, the SDV demo application in digital.auto playground, including the digital.auto playground user interface displaying the key parameters of the EV power optimization app.
COVESA-EV Power Optimization Project Makes Inroads to a Software Defined Future
So far, the collaboration has yielded many benefits for the COVESA-EV Power Optimization project. Overall, the #digitalfirst prototyping approach using Twin Builder led to rapid verification and validation of the power optimization software algorithms — a dramatic improvement over the costly and time-consuming build-up of a physical test vehicle.
“The benefits of this approach are manyfold,” says Slama. “The digital.auto playground enabled us to use real-world COVESA vehicle APIs and integrate everything in a cloud-native environment, supporting on-the-fly optimization. Using digital twin simulation based on Ansys Twin Builder is a key driver for vehicle virtualization, helping us make significant inroads in SDV tech.”
Learn more about how Anysys Twin Builder can help with your EV designs.